
-
公司介绍
-
产品分类
- 넷 控制器
- 넷 驱动器
- 넷 电机
- 넷 反馈系统
- 넷 执行结构
- 넷 减速机
- 넷 平台模组
- 넷 定制/集成
-
选型指导
- 넷 控制器选型
- 넷 电机选型
- 넷 驱动器选型
- 넷 减速机选型
- 넷 电动缸/电推杆选型
-
行业案例
- 넷 机器人
- 넷 半导体
- 넷 医疗
- 넷 仓储物流
- 넷 现代农业
- 넷 精密运动
-
资料下载
- 넷 产品手册
- 넷 模型图纸
- 넷 计算工具
-
联系我们
-
公司介绍
-
产品分类
- 넷 控制器
- 넷 驱动器
- 넷 电机
- 넷 反馈系统
- 넷 执行结构
- 넷 减速机
- 넷 平台模组
- 넷 定制/集成
-
选型指导
- 넷 控制器选型
- 넷 电机选型
- 넷 驱动器选型
- 넷 减速机选型
- 넷 电动缸/电推杆选型
-
行业案例
- 넷 机器人
- 넷 半导体
- 넷 医疗
- 넷 仓储物流
- 넷 现代农业
- 넷 精密运动
-
资料下载
- 넷 产品手册
- 넷 模型图纸
- 넷 计算工具
-
联系我们


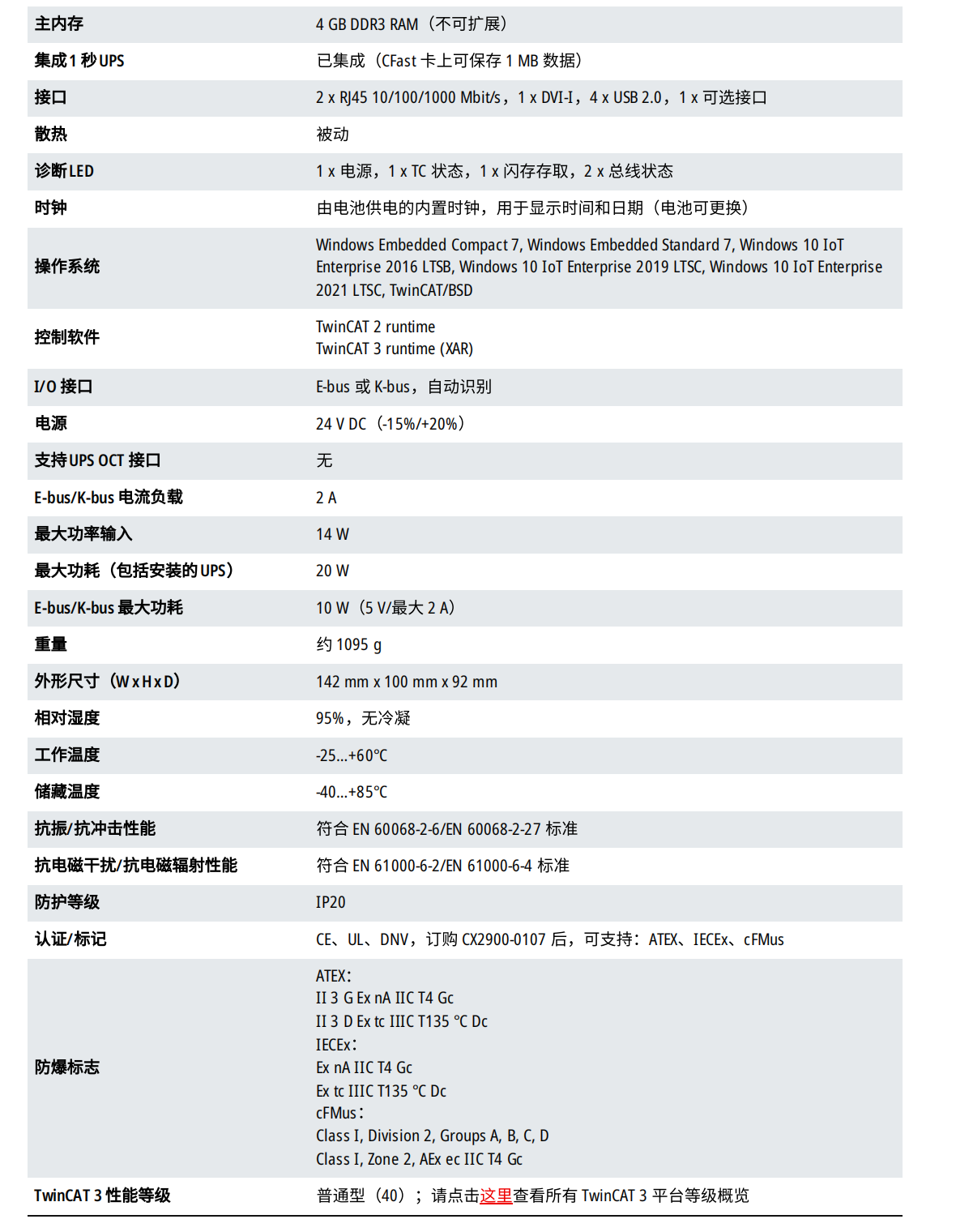
运动控制器 TwinCAT平台
可加载 TwinCAT NC PTP、NC I、NC G-Code;支持电子齿轮、凸轮、飞锯、CNC 路径插补。 通过 EtherCAT 周期 <1 ms,可同步控制 8-64 轴(视授权与网络负载)。可用于执行 PLC 或 PLC/运动控制任务(带或不带可视化界面)。运动控制应用也可以通过插补轴运动实施。可通过模块扩展通信和IO节点。
超迈动力(北京)科技有限公司集研发、生产、销售于一体,总部位于北京,拥有众多行业经验十年以上的销售工程师、应用工程师、技术工程师,打造了一支服务于运动控制行业的高质量团队。

-
ꁸ 回到顶部
-
ꂅ 18518556588
-
ꁗ QQ客服
-
ꀥ 微信二维码

